
Chúng ta cần sử dụng nguồn ngoài 5V trong trường hợp này vì những module servo và HC-05 cần dòng tối thiểu là 2A để hoàn toàn có thể hoạt động giải trí. Dưới đây là list những linh phụ kiện :
- MG996R Servo Motor X 3
- SG90 Micro Servo Motor X 3
- HC-05 Bluetooth
- Arduino Board
- 5V 2A DC Adaptor
Code điều khiển Arduino
Vì đoạn code tương đối dài, để hiểu rõ hơn, chúng ta sẽ chia code của chương trình thành các phần khác nhau và có giải thích cho từng phần. Và cuối bài viết sẽ là source code hoàn chỉnh.
Bạn đang đọc: Arduino cánh tay robot 5 bậc (P2)
Vì vậy, thứ nhất tất cả chúng ta cần add thư viện Software Serial để liên kết với mô-đun Bluetooth. Đồng thời ta add thư viện servo. Cả hai thư viện này đều có sẵn trong Arduino IDE, do đó bạn không cần setup chúng. Sau đó, tất cả chúng ta cần xác lập sáu servo, mô-đun Bluetooth HC-05 và 1 số ít biến để tàng trữ vị trí hiện tại và trước đó của những servo, cũng như những mảng để tàng trữ những vị trí hoặc những bước cho chính sách tự động hóa .
#include#include Servo servo01; Servo servo02; Servo servo03; Servo servo04; Servo servo05; Servo servo06; SoftwareSerial Bluetooth(3, 4); // Arduino(RX, TX) - HC-05 Bluetooth (TX, RX) // Vị trí hiện tại int servo1Pos, servo2Pos, servo3Pos, servo4Pos, servo5Pos, servo6Pos; // Vị trí trước đó int servo1PPos, servo2PPos, servo3PPos, servo4PPos, servo5PPos, servo6PPos; // Mảng dùng để lưu trữ các bước int servo01SP[50], servo02SP[50], servo03SP[50], servo04SP[50], servo05SP[50], servo06SP[50]; int speedDelay = 20; int index = 0; String dataIn = "";
Trong phần setup, tất cả chúng ta cần khởi tạo những servo và mô-đun Bluetooth đồng thời vận động và di chuyển cánh tay robot đến vị trí khởi đầu. Chúng ta triển khai điều đó bằng cách sử dụng hàm write ( ) dùng để chuyển dời servo đến bất kể vị trí nào từ 0 đến 180 độ .
void setup() {
servo01.attach(5);
servo02.attach(6);
servo03.attach(7);
servo04.attach(8);
servo05.attach(9);
servo06.attach(10);
Bluetooth.begin(38400); // Default baud rate of the Bluetooth module
Bluetooth.setTimeout(1);
delay(20);
// Robot arm initial position
servo1PPos = 90;
servo01.write(servo1PPos);
servo2PPos = 150;
servo02.write(servo2PPos);
servo3PPos = 35;
servo03.write(servo3PPos);
servo4PPos = 140;
servo04.write(servo4PPos);
servo5PPos = 85;
servo05.write(servo5PPos);
servo6PPos = 80;
servo06.write(servo6PPos);
}
Tiếp theo, trong phần loop, sử dụng hàm Bluetooth. Available ( ), tất cả chúng ta sẽ liên tục kiểm tra xem có tài liệu đến từ smart phone hay không. Nếu đúng, sử dụng hàm readString ( ), tất cả chúng ta đọc tài liệu dưới dạng chuỗi và tàng trữ nó vào biến dataIn. Tùy thuộc vào tài liệu đến, tất cả chúng ta sẽ cho cánh tay robot biết nó cần phải làm gì .
// Check for incoming data
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.readString(); // Read the data as string
App điều khiển cánh tay robot – sử dụng app inventor
Cùng nhìn qua xem app sẽ gửi những tài liệu gì đến cánh tay robot .

Trong trường hợp này cũng ta sử dụng MIT App Inventor để tạo app tiếp xúc và điều khiển và tinh chỉnh cánh tay robot. Ở phía trên app sẽ có 2 nút để liên kết với robot trải qua board HC-05. Phía dưới là 6 thanh trượt để điều khiển và tinh chỉnh 6 động cơ servo .

Mỗi thanh trượt có giá trị bắt đầu, tối thiểu và tối đa khác nhau tương thích với những khớp tay robot. Ở dưới cùng của ứng dụng, tất cả chúng ta có ba nút, SAVE, RUN và RESET trải qua đó tất cả chúng ta hoàn toàn có thể lập trình cánh tay robot chạy tự động hóa. Ngoài ra còn có một label bên dưới cho thấy số bước tất cả chúng ta đã lưu .
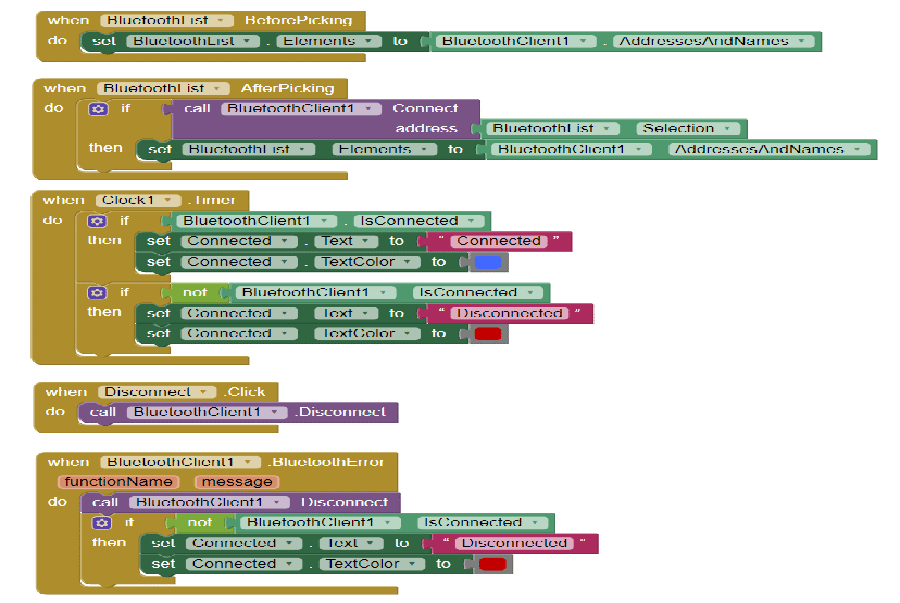
Sau đây, tất cả chúng ta đi sâu vào phần code của app một tí. Đầu tiên, ở phía bên trái, tất cả chúng ta có những khối để liên kết smart phone với mô-đun Bluetooth .

Sau đó, tất cả chúng ta có những khối thanh trượt để điều khiển và tinh chỉnh vị trí servo và những khối nút để lập trình cho cánh tay robot. Vì vậy, nếu tất cả chúng ta đổi khác vị trí của thanh trượt, sử dụng tính năng Bluetooth. SendText, tất cả chúng ta sẽ gửi một đoạn string tới Arduino. Đoạn string này gồm có một tiền tố cho biết thanh trượt nào đã được đổi khác cũng như giá trị hiện tại của thanh trượt .

Dưới đây là MIT App Inventor project và file APK :
Do đó, trong Arduino, sử dụng hàm startedWith ( ), tất cả chúng ta kiểm tra tiền tố của từng tài liệu đến và vì thế robot biết phải làm gì tiếp theo. Ví dụ : nếu tiền tố là “ s1 ” thì tất cả chúng ta biết rằng tất cả chúng ta cần vận động và di chuyển servo số 1. Sử dụng hàm substring ( ), tất cả chúng ta sẽ có được đoạn string còn lại. Với giá trị vị trí đó, tất cả chúng ta quy đổi nó thành số int và sử dụng để chuyển dời servo đến đúng vị trí .
// If "Waist" slider has changed value - Move Servo 1 to position
if (dataIn.startsWith("s1")) {
// Extract only the number. E.g. from "s1120" to "120"
String dataInS = dataIn.substring(2, dataIn.length());
servo1Pos = dataInS.toInt(); // Convert the string into integer
Ở đây tất cả chúng ta chỉ cần gọi hàm write ( ) và servo sẽ vận động và di chuyển đến vị trí đó, nhưng theo cách đó, servo sẽ chạy ở vận tốc tối đa của nó. Thay vào đó, tất cả chúng ta cần trấn áp vận tốc của những servo, thế cho nên tất cả chúng ta sử dụng một số ít vòng lặp FOR để chuyển dần servo từ vị trí trước đó sang vị trí hiện tại bằng cách cho delay giữa mỗi lần lặp. Thay đổi thời hạn trễ, bạn hoàn toàn có thể biến hóa vận tốc của servo .
// We use for loops so we can control the speed of the servo
// If previous position is bigger then current position
if (servo1PPos > servo1Pos) {
for ( int j = servo1PPos; j >= servo1Pos; j--) { // Run servo down
servo01.write(j);
delay(20); // defines the speed at which the servo rotates
}
}
// If previous position is smaller then current position
if (servo1PPos < servo1Pos) {
for ( int j = servo1PPos; j <= servo1Pos; j++) { // Run servo up
servo01.write(j);
delay(20);
}
}
servo1PPos = servo1Pos; // set current position as previous position
}
Phương pháp tương tự như được sử dụng để tinh chỉnh và điều khiển từng trục của cánh tay robot .
Đồng thời, nếu tất cả chúng ta nhấn nút SAVE, vị trí của mỗi mô tơ servo sẽ được lưu trong một mảng. Với mỗi lần nhấn, biến “ index ” sẽ được tăng lên .
// If button "SAVE" is pressed
if (dataIn.startsWith("SAVE")) {
servo01SP[index] = servo1PPos; // save position into the array
servo02SP[index] = servo2PPos;
servo03SP[index] = servo3PPos;
servo04SP[index] = servo4PPos;
servo05SP[index] = servo5PPos;
servo06SP[index] = servo6PPos;
index++; // Increase the array index
}
Sau đó, nếu tất cả chúng ta nhấn nút RUN, tất cả chúng ta gọi hàm tùy chỉnh runservo ( ) để chạy những bước được tàng trữ. Trong hàm này, tất cả chúng ta chạy những bước được tàng trữ nhiều lần cho đến khi nhấn nút RESET. Sử dụng vòng lặp FOR, tất cả chúng ta chạy qua tổng thể những vị trí được tàng trữ trong những mảng và đồng thời tất cả chúng ta kiểm tra xem tất cả chúng ta có bất kỳ dữ liệu đến từ smart phone hay không. Dữ liệu này hoàn toàn có thể là nút RUN / PAUSE, tạm dừng robot và nếu nhấp lại sẽ liên tục với chế tự động hóa. Ngoài ra, nếu tất cả chúng ta biến hóa vị trí thanh trượt vận tốc, tất cả chúng ta sẽ sử dụng giá trị đó để đổi khác thời hạn delay giữa mỗi lần lặp trong những vòng lặp FOR để tinh chỉnh và điều khiển vận tốc của động cơ servo .
// Automatic mode custom function - run the saved steps
void runservo() {
while (dataIn != "RESET") { // Run the steps over and over again until "RESET" button is pressed
for (int i = 0; i <= index - 2; i++) { // Run through all steps(index)
if (Bluetooth.available() > 0) { // Check for incomding data
dataIn = Bluetooth.readString();
if ( dataIn == "PAUSE") { // If button "PAUSE" is pressed
while (dataIn != "RUN") { // Wait until "RUN" is pressed again
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.readString();
if ( dataIn == "RESET") {
break;
}
}
}
}
// If SPEED slider is changed
if (dataIn.startsWith("ss")) {
String dataInS = dataIn.substring(2, dataIn.length());
speedDelay = dataInS.toInt(); // Change servo speed (delay time)
}
}
// Servo 1
if (servo01SP[i] == servo01SP[i + 1]) {
}
if (servo01SP[i] > servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j >= servo01SP[i + 1]; j--) {
servo01.write(j);
delay(speedDelay);
}
}
if (servo01SP[i] < servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j <= servo01SP[i + 1]; j++) {
servo01.write(j);
delay(speedDelay);
}
}
Cuối cùng, nếu tất cả chúng ta nhấn nút RESET, tất cả chúng ta sẽ xóa toàn bộ tài liệu từ những mảng về 0 và cũng đặt lại những chỉ số về 0 để tất cả chúng ta hoàn toàn có thể lập trình lại cánh tay robot bằng những hoạt động mới .
// If button "RESET" is pressed
if ( dataIn == "RESET") {
memset(servo01SP, 0, sizeof(servo01SP)); // Clear the array data to 0
memset(servo02SP, 0, sizeof(servo02SP));
memset(servo03SP, 0, sizeof(servo03SP));
memset(servo04SP, 0, sizeof(servo04SP));
memset(servo05SP, 0, sizeof(servo05SP));
memset(servo06SP, 0, sizeof(servo06SP));
index = 0; // Index to 0
}
Đoạn code hoàn chỉnh của cánh tay robot 5 bậc sử dụng Arduino
/*
DIY Arduino Robot Arm Smartphone Control
by Dejan, www.HowToMechatronics.com
*/
#include
#include
Servo servo01;
Servo servo02;
Servo servo03;
Servo servo04;
Servo servo05;
Servo servo06;
SoftwareSerial Bluetooth(3, 4); // Arduino(RX, TX) - HC-05 Bluetooth (TX, RX)
int servo1Pos, servo2Pos, servo3Pos, servo4Pos, servo5Pos, servo6Pos; // current position
int servo1PPos, servo2PPos, servo3PPos, servo4PPos, servo5PPos, servo6PPos; // previous position
int servo01SP[50], servo02SP[50], servo03SP[50], servo04SP[50], servo05SP[50], servo06SP[50]; // for storing positions/steps
int speedDelay = 20;
int index = 0;
String dataIn = "";
void setup() {
servo01.attach(5);
servo02.attach(6);
servo03.attach(7);
servo04.attach(8);
servo05.attach(9);
servo06.attach(10);
Bluetooth.begin(38400); // Default baud rate of the Bluetooth module
Bluetooth.setTimeout(1);
delay(20);
// Robot arm initial position
servo1PPos = 90;
servo01.write(servo1PPos);
servo2PPos = 150;
servo02.write(servo2PPos);
servo3PPos = 35;
servo03.write(servo3PPos);
servo4PPos = 140;
servo04.write(servo4PPos);
servo5PPos = 85;
servo05.write(servo5PPos);
servo6PPos = 80;
servo06.write(servo6PPos);
}
void loop() {
// Check for incoming data
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.readString(); // Read the data as string
// If "Waist" slider has changed value - Move Servo 1 to position
if (dataIn.startsWith("s1")) {
String dataInS = dataIn.substring(2, dataIn.length()); // Extract only the number. E.g. from "s1120" to "120"
servo1Pos = dataInS.toInt(); // Convert the string into integer
// We use for loops so we can control the speed of the servo
// If previous position is bigger then current position
if (servo1PPos > servo1Pos) {
for ( int j = servo1PPos; j >= servo1Pos; j--) { // Run servo down
servo01.write(j);
delay(20); // defines the speed at which the servo rotates
}
}
// If previous position is smaller then current position
if (servo1PPos < servo1Pos) {
for ( int j = servo1PPos; j <= servo1Pos; j++) { // Run servo up
servo01.write(j);
delay(20);
}
}
servo1PPos = servo1Pos; // set current position as previous position
}
// Move Servo 2
if (dataIn.startsWith("s2")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo2Pos = dataInS.toInt();
if (servo2PPos > servo2Pos) {
for ( int j = servo2PPos; j >= servo2Pos; j--) {
servo02.write(j);
delay(50);
}
}
if (servo2PPos < servo2Pos) {
for ( int j = servo2PPos; j <= servo2Pos; j++) {
servo02.write(j);
delay(50);
}
}
servo2PPos = servo2Pos;
}
// Move Servo 3
if (dataIn.startsWith("s3")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo3Pos = dataInS.toInt();
if (servo3PPos > servo3Pos) {
for ( int j = servo3PPos; j >= servo3Pos; j--) {
servo03.write(j);
delay(30);
}
}
if (servo3PPos < servo3Pos) {
for ( int j = servo3PPos; j <= servo3Pos; j++) {
servo03.write(j);
delay(30);
}
}
servo3PPos = servo3Pos;
}
// Move Servo 4
if (dataIn.startsWith("s4")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo4Pos = dataInS.toInt();
if (servo4PPos > servo4Pos) {
for ( int j = servo4PPos; j >= servo4Pos; j--) {
servo04.write(j);
delay(30);
}
}
if (servo4PPos < servo4Pos) {
for ( int j = servo4PPos; j <= servo4Pos; j++) {
servo04.write(j);
delay(30);
}
}
servo4PPos = servo4Pos;
}
// Move Servo 5
if (dataIn.startsWith("s5")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo5Pos = dataInS.toInt();
if (servo5PPos > servo5Pos) {
for ( int j = servo5PPos; j >= servo5Pos; j--) {
servo05.write(j);
delay(30);
}
}
if (servo5PPos < servo5Pos) {
for ( int j = servo5PPos; j <= servo5Pos; j++) {
servo05.write(j);
delay(30);
}
}
servo5PPos = servo5Pos;
}
// Move Servo 6
if (dataIn.startsWith("s6")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo6Pos = dataInS.toInt();
if (servo6PPos > servo6Pos) {
for ( int j = servo6PPos; j >= servo6Pos; j--) {
servo06.write(j);
delay(30);
}
}
if (servo6PPos < servo6Pos) {
for ( int j = servo6PPos; j <= servo6Pos; j++) {
servo06.write(j);
delay(30);
}
}
servo6PPos = servo6Pos;
}
// If button "SAVE" is pressed
if (dataIn.startsWith("SAVE")) {
servo01SP[index] = servo1PPos; // save position into the array
servo02SP[index] = servo2PPos;
servo03SP[index] = servo3PPos;
servo04SP[index] = servo4PPos;
servo05SP[index] = servo5PPos;
servo06SP[index] = servo6PPos;
index++; // Increase the array index
}
// If button "RUN" is pressed
if (dataIn.startsWith("RUN")) {
runservo(); // Automatic mode - run the saved steps
}
// If button "RESET" is pressed
if ( dataIn == "RESET") {
memset(servo01SP, 0, sizeof(servo01SP)); // Clear the array data to 0
memset(servo02SP, 0, sizeof(servo02SP));
memset(servo03SP, 0, sizeof(servo03SP));
memset(servo04SP, 0, sizeof(servo04SP));
memset(servo05SP, 0, sizeof(servo05SP));
memset(servo06SP, 0, sizeof(servo06SP));
index = 0; // Index to 0
}
}
}
// Automatic mode custom function - run the saved steps
void runservo() {
while (dataIn != "RESET") { // Run the steps over and over again until "RESET" button is pressed
for (int i = 0; i <= index - 2; i++) { // Run through all steps(index)
if (Bluetooth.available() > 0) { // Check for incomding data
dataIn = Bluetooth.readString();
if ( dataIn == "PAUSE") { // If button "PAUSE" is pressed
while (dataIn != "RUN") { // Wait until "RUN" is pressed again
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.readString();
if ( dataIn == "RESET") {
break;
}
}
}
}
// If speed slider is changed
if (dataIn.startsWith("ss")) {
String dataInS = dataIn.substring(2, dataIn.length());
speedDelay = dataInS.toInt(); // Change servo speed (delay time)
}
}
// Servo 1
if (servo01SP[i] == servo01SP[i + 1]) {
}
if (servo01SP[i] > servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j >= servo01SP[i + 1]; j--) {
servo01.write(j);
delay(speedDelay);
}
}
if (servo01SP[i] < servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j <= servo01SP[i + 1]; j++) {
servo01.write(j);
delay(speedDelay);
}
}
// Servo 2
if (servo02SP[i] == servo02SP[i + 1]) {
}
if (servo02SP[i] > servo02SP[i + 1]) {
for ( int j = servo02SP[i]; j >= servo02SP[i + 1]; j--) {
servo02.write(j);
delay(speedDelay);
}
}
if (servo02SP[i] < servo02SP[i + 1]) {
for ( int j = servo02SP[i]; j <= servo02SP[i + 1]; j++) {
servo02.write(j);
delay(speedDelay);
}
}
// Servo 3
if (servo03SP[i] == servo03SP[i + 1]) {
}
if (servo03SP[i] > servo03SP[i + 1]) {
for ( int j = servo03SP[i]; j >= servo03SP[i + 1]; j--) {
servo03.write(j);
delay(speedDelay);
}
}
if (servo03SP[i] < servo03SP[i + 1]) {
for ( int j = servo03SP[i]; j <= servo03SP[i + 1]; j++) {
servo03.write(j);
delay(speedDelay);
}
}
// Servo 4
if (servo04SP[i] == servo04SP[i + 1]) {
}
if (servo04SP[i] > servo04SP[i + 1]) {
for ( int j = servo04SP[i]; j >= servo04SP[i + 1]; j--) {
servo04.write(j);
delay(speedDelay);
}
}
if (servo04SP[i] < servo04SP[i + 1]) {
for ( int j = servo04SP[i]; j <= servo04SP[i + 1]; j++) {
servo04.write(j);
delay(speedDelay);
}
}
// Servo 5
if (servo05SP[i] == servo05SP[i + 1]) {
}
if (servo05SP[i] > servo05SP[i + 1]) {
for ( int j = servo05SP[i]; j >= servo05SP[i + 1]; j--) {
servo05.write(j);
delay(speedDelay);
}
}
if (servo05SP[i] < servo05SP[i + 1]) {
for ( int j = servo05SP[i]; j <= servo05SP[i + 1]; j++) {
servo05.write(j);
delay(speedDelay);
}
}
// Servo 6
if (servo06SP[i] == servo06SP[i + 1]) {
}
if (servo06SP[i] > servo06SP[i + 1]) {
for ( int j = servo06SP[i]; j >= servo06SP[i + 1]; j--) {
servo06.write(j);
delay(speedDelay);
}
}
if (servo06SP[i] < servo06SP[i + 1]) {
for ( int j = servo06SP[i]; j <= servo06SP[i + 1]; j++) {
servo06.write(j);
delay(speedDelay);
}
}
}
}
}
Các bạn có thể tham khảo các dự án khác tại: https://cuahangespace.com/category/arduino-code/
Nhớ like và share bài viết trên fanpage nhé : https://www.facebook.com/abcArduino
Source: https://sangtaotrongtamtay.vn
Category: Công nghệ
Để lại một bình luận