Nhờ sự tăng trưởng của cách mạng công nghiệp 4.0 và các công nghệ tiên tiến mưu trí, rất nhiều ứng dụng mà bất kỳ một lập trình viên mới vào nghề nào cũng phải biết. Không kể đến kinh nghiệm tay nghề lập trình, hiện tại có nhiều chiêu thức lập trình robot, tùy thuộc vào sở trường thích nghi và độ phức tạp của ứng dụng mà các lập trình viên sẽ chọn ra giải pháp lập trình tương thích với việc làm. Các cách lập trình phổ cập gồm có :
- Lập trình robot bằng bộ điều khiển:
Đây là cách lập trình thông dụng nhất lúc bấy giờ, được sử dụng để lập trình 90 % robot công nghiệp đang sử dụng trong sản xuất. Hình thức lập trình này là sử dụng bộ tinh chỉnh và điều khiển để tinh chỉnh và điều khiển robot và các thiết bị khác đến các vị trí mong ước. Sau đây là các tùy chọn phổ cập nhất lúc bấy giờ :
Chuyển động dựa vào các khớp:
Bạn đang đọc: 5 cách để lập trình robot
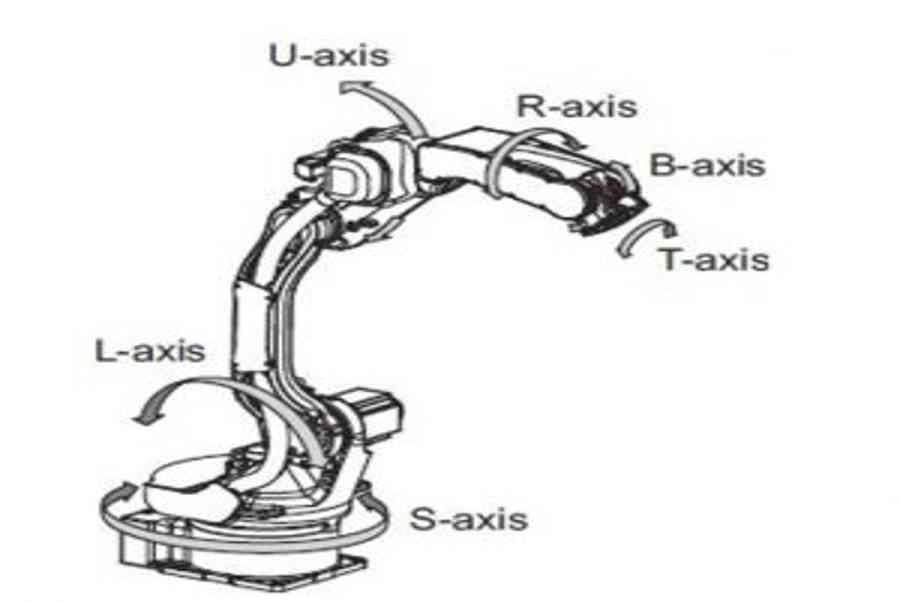
Hệ tọa độ đặt tại các khớp là hệ tọa độ mặc định của robot công nghiệp Yaskawa, hoạt động bằng cách quay các động cơ servo tại các khớp hoặc quay động cơ tinh chỉnh và điều khiển hướng của hàng loạt robot. Sử dụng cách này được cho phép mạng lưới hệ thống thuận tiện chuyển dời mỗi motor ( link ) theo hướng thuận hay ngược chiều kim đồng hồ đeo tay .
Với Yaskawa robots, mỗi một bậc tự do đều được trình diễn bằng một kí tự khác nhau : S ( Xoay ), L ( Xuống ), U ( Lên ), B ( Uốn ), R ( Xoay ), T ( Xoắn ). Trong các robot có độ linh động cao như Yaskawa VS100, VA1400 II, SP100B hoặc GP110 sẽ có thêm một bậc tự do thứ 7, được kí hiệu bằng chữ E ( Khuỷu tay ) .
Hệ tọa độ X,Y,Z của robot
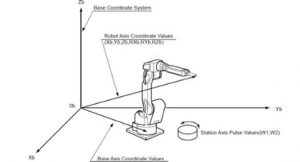
Trong cách lập trình, điều khiển robot này, hệ thống điều khiển của robot Tool Center Point (Một vị trí trong không gian để dễ xác định các điểm liên quan) sẽ tự động tính toán lượng di chuyển của mỗi khớp, cho phép người dùng điều khiển theo hệ tọa độ toàn cục X, Y, Z. Hệ tọa độ này tuân theo “quy tắc bàn tay phải” – Quy tắc cho các lập trình viên biết được hướng của họ đối với hệ trục tọa độ làm việc của robot – sử dụng robot làm gốc cho mỗi trục. Nhớ rằng dấu (+ hoặc -) cho biết hướng của điểm dọc theo mỗi trục, hai điểm khác nhau sẽ không cùng một tọa độ. Ngoài ra, chuyển động xoay quanh mỗi trục được kí hiệu là
Rx, Ry hoặc Rz phụ thuộc vào trục.
Hệ tọa độ X, Y, Z theo công cụ của robot.
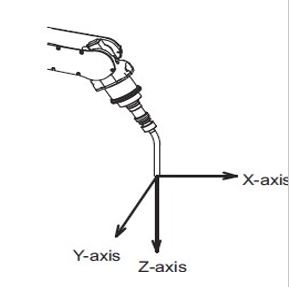
Rất tương thích cho việc ứng dụng robot vào việc làm hàn, cắt, sơn và dán. Hệ tọa độ này chỉ điều khiển và tinh chỉnh duy nhất những công cụ của robot hoặc hoạt động giải trí TCP của robot, nó vận động và di chuyển tương ứng với trục tọa độ X, Y, Z của công cụ. Hơn nữa, hệ tọa độ này không đứng yên, được cho phép gốc tọa độ chuyển dời theo hoạt động của công cụ. Thiết lập cho mạng lưới hệ thống thường thiết lập hướng tiếp cận / Khởi hành, nhưng nó có tương quan đến ứng dụng .
Hệ tọa độ của người dùng
Hệ tọa độ này được thiết lập bởi người dùng thông qua một ứng dụng và cho phép vị trí đó có thể sử dụng lại một cách hiệu quả. Khi làm việc, người dùng có thể đặt trước một vị trí dựa trên vị trí của người dùng gắn vào pallet, trước khi di chuyển sang pallet khác ở vị trí khác một cách dễ dàng. Điều này cũng hữu ích khi robot dùng máy ảnh để định vị các chi tiết vì robot có thể nâng nhiều chi tiết tại nhiều vị trí khác, sử dụng cùng một chuyển động đã được lập trình dựa trên hệ tọa độ của bộ phận.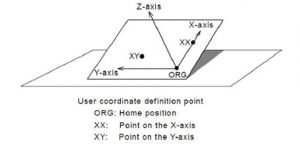
Hệ tọa độ của người dùng được xác lập bởi 3 điểm cho trước. Đối với robot Yaskawa, ba điểm xác lập này là ORG ( vị trí gốc ), XX ( một điểm trên trục X ) và XY ( một điểm trên trục Y ). Lưu ý, hướng của trục Y và Z dựa trên phía của trục X mà các điểm XY cho trước .
- Cách lập trình “Cầm tay chỉ việc” (Hand-Guiding)
Đây là một chính sách cộng tác, được cho phép lập trình trong thực tiễn không cần bộ tinh chỉnh và điều khiển và không cần chăm sóc đến vị trí bắt đầu của robot. Rất thích hợp cho người mới rẽ sang nghành nghề dịch vụ robot, chiêu thức này sử dụng cảm ứng mô-men xoắn tích hợp để cho phép lập trình viên hướng dẫn vật lý hoạt động của robot, thân thiện với người dùng. Hơn nữa, chiêu thức này được cho phép người dùng sửa lỗi nhanh gọn và hiệu suất cao, giúp mọi thứ trở lại như thông thường .
Trong khi hướng dẫn bằng tay, người dùng hoàn toàn có thể hạn chế hoạt động của robot sao cho tương thích nhất với sở trường thích nghi và ứng dụng của họ. Yaskawa được cho phép lập trình viên chọn giữa 1 số ít kiểu hoạt động :
All joints (Tất cả các khớp): Hướng dẫn bằng tay khi tất cả các khớp có thể chuyển động cho phép người dùng xoay tự do cả sáu khớp bằng cách ấn vào bất kỳ thanh nào của robot. Tùy chọn này lý tưởng cho những ai muốn di chuyển robot đến nhiều góc độ khác nhau hoặc biểu diễn các thay đổi vị trí của robot một cách ấn tượng.
Tool Joints (Khớp tại khâu cuối cùng): Khi sử dụng hướng dẫn bằng tay chỉ với Khớp Công cụ, người dùng robot có thể định hướng lại dụng cụ một cách cẩn thận bằng cách xoay bất kỳ liên kết nào trong ba liên kết cuối cùng của robot. Điều này giúp người dùng không gây ra chuyển động không mong muốn khi chỉ muốn điều chỉnh lại vị trí công cụ.
XYZ+ TOOL: Loại chuyển động phổ biến nhất để hướng dẫn bằng tay cho rô bốt Yaskawa là chọn Công cụ XYZ + cho phép người dùng không chỉ di chuyển công cụ một cách tuyến tính dọc theo XYZ mà còn xoay trục cuối cùng để xoay công cụ. Tùy chọn này lý tưởng để giữ cho công cụ không vô tình nghiêng sang bên.
- Bộ điều khiển động lực học:
Để hiểu được hoạt động của cánh tay robot rất phức tạp, đặc biệt quan trọng với những người mới làm quen với “ Quy tắc bàn tay phải ”. Vì thế, các chuyển gia ở Yaskawa đã tạo ra một bộ điều khiển và tinh chỉnh mưu trí dựa trên máy tính bảng để tương hỗ làm quen với robot .
Với các tính năng và giao diện văn minh, Bộ tinh chỉnh và điều khiển được tích hợp các công cụ giúp việc lập trình robot trực quan hơn và dễ sử dụng. Từ việc “ nhấp chuột và lập trình ”, hướng dẫ robot trải qua các lệnh lập trình quen thuộc đến “ Hệ tọa độ mưu trí ” giúp người lập trình là hệ quy chiếu và vô hiệu các hệ tọa độ ( XYZ ) thường thì. Hơn nữa, việc chạy thủ công bằng tay các mạng lưới hệ thống robot phức tạp cũng được hướng dẫn .
- Lập trình ngoại tuyến.
Những công cụ hoàn toàn có thể giúp người lập trình mô phỏng vận dụng quá trình robot và lập trình ngoại tuyến ( OLP ) thuận tiện. Phổ biến hơn, OLP sử dụng trình diễn 3D của một thành phần robot hoặc trên dây chuyền sản xuất sản xuất hoàn toàn có thể trực quan thấy cách robot chuyển dời theo đường được lập trình. Cách lập trình này thường được sử dụng để điều phối sự tương tác phức tạp giữa nhiều robot và dây chuyền sản xuất sản xuất. Công cụ này có ích trong việc chứng tỏ ý tưởng sáng tạo, nghiên cứu và phân tích số lượng giới hạn khớp, phát hiện va chạm hoàn toàn có thể xảy ra, …
Các đơn vị sản xuất không có năng lực gián đoạn quy trình sản xuất cũng hoàn toàn có thể khai thác từ các ứng dụng lập trình ngoại tuyến can đảm và mạnh mẽ như MotoSim ®. Xa hơn nữa, ứng dụng này hoàn toàn có thể sử dụng để đào lạo người quản lý và vận hành, lập trình robot và tối ưu hóa từ bất kỳ đâu trên quốc tế. Cho phép người quản lý và vận hành ở bất kể công ty nào cũng hoàn toàn có thể tạo, kiểm soát và điều chỉnh và kiểm tra các chương trình robot trước khi được tiến hành trong nhà máy sản xuất. Cách lập trình này cực kỳ thích hợp cho việc lập kế hoạch dây chuyền sản xuất sản xuất phức tạp, yên cầu nhiều nguyên công như mài, cắt, sơn, …. OLP giúp tránh lỗi khi lập trình robot, tiết kiệm chi phí thời hạn và giảm ngân sách .
Để thuận tiện cho người dùng, phong cách lập trình linh hoạt này cho phép cúng ta kết hợp nhiều công việc hơn với sự chuyển đổi đơn giản từ việc này sang việc khác. Tương tự, các công ty lớn với nhiều địa điểm và khu vực làm việc, có thể giảm thiểu thời gian lập trình và sự mâu thuẫn phần mềm bằng cách phân phối trực tiếp công việc từ một nguồn trung tâm đã được kiểm soát.
- Lập trình PLC:
Được sử dụng thoáng đãng trong nghành nghề dịch vụ tự động hóa, các nền tảng tinh chỉnh và điều khiển chung cung ứng sự thống nhất trong việc lập trình các thiết bị TT ( tức là robot ) trong một sơ đồ. Các tùy chọn giao diện robot độc lạ như bộ điều khiển và tinh chỉnh logic lập trình ( PLC ) MLX của Yaskawa được cho phép hàng loạt robot được lập trình bằng ngôn từ lập trình PLC đã chọn, thay vì ngôn từ robot thường thì. Sự đơn giản hóa này giúp vô hiệu sự trùng lặp trong một mạng lưới hệ thống, giúp giảm ngân sách hữu hình trong 1 số ít nghành nghề dịch vụ. Nó đồng thời cũng tăng cường nhân sự có năng lực lập trình hoặc bảo dưỡng các mạng lưới hệ thống robot .
- Hướng đi cho tương lai :
Mặc dù trí tuệ tự tạo và máy học đã được vận dụng trong việc tự động hóa robot nhưng trong thực tiễn vẫn chưa đạt được khá đầy đủ. Từ tầm nhìn đến năng lực chớp lấy và từ trấn áp hoạt động đến giám sát tài liệu, AI và học máy đang tạo ra ảnh hưởng tác động đổi khác so với chuỗi đáp ứng và các ứng dụng phục vụ hầu cần .
Trong tương lai, các giao diện thực tiễn trực quan ( AR ) hoặc trong thực tiễn bán trực quan để tinh chỉnh và điều khiển robot sẽ được vận dụng, giúp người dùng lập trình đường đi của robot liền mạch dựa trên cử chỉ của người dùng và bắt chước. Các chiêu thức tựa như với máy học trên cho thấy nhiều hứa hẹn với nhiều nghành sản xuất, công nghiệp. Hiên nay, các doanh nghiệp từ đơn vị sản xuất xe hơi đến các công ty mới xây dựng đang tăng cường góp vốn đầu tư vào mảng công nghệ tiên tiến để đưa chúng thành công nghệ đứng đầu .
Source: https://sangtaotrongtamtay.vn
Category: Công nghệ
Để lại một bình luận