
Hướng dẫn ráp robot 6 bậc dạng cộng tác
Trong dự án Bất Động Sản này, Jeff Kerr chỉ cho tất cả chúng ta cách sản xuất một cánh tay robot sáu bậc tương hỗ hoạt động phối hợp nhiều trục. Cánh tay là một phiên bản thu nhỏ của robot UR3 công nghiệp và gồm có 1 số ít bộ phận phức tạp .

Chỉ cần chắc chắn rằng bạn làm theo các hướng dẫn và theo dõi các thay đổi hoặc cải tiến!
Bạn đang đọc: Hướng dẫn ráp robot 6 bậc dạng cộng tác
Cùng bắt tay vào làm !
Thiết bị truyền động
Khi tổng thể được triển khai, bạn nên mở màn từ khớp vai đến đầu ngón tay. Nói cách khác, có ba khớp chính – vai, khuỷu tay và cổ tay – và sự hoạt động của những khớp này sẽ được tương hỗ bởi những bộ truyền động chạy code để tăng cường và giảm tốc. Các bộ truyền động, có thành phần cốt lõi là vi tinh chỉnh và điều khiển và động cơ bước, sẽ được đặt bên trong vỏ in 3D .
Đương nhiên, cũng có một dụng cụ kẹp, sẽ hoạt động giải trí giống như hai ngón tay của con người. Một động cơ tương hỗ trong hoạt động của nó .
Lưu ý: Các bộ truyền động và bộ kẹp tồn tại riêng biệt như các dự án độc lập.
Thiết bị truyền động
Các bộ truyền động là một phần quan trọng của dự án Bất Động Sản này và Jeff đã sử dụng một trang Thingiverse riêng không liên quan gì đến nhau để phân phối toàn bộ những chi tiết cụ thể từ in ấn đến lắp ráp .
Nói chung, một bộ truyền động là một thành phần quy đổi nguồn năng lượng thành hoạt động. Bạn hoàn toàn có thể nghĩ về nó như một cảm ứng, lấy tín hiệu điện làm đầu vào và xuất ra hoạt động trong quốc tế vật lý. Ví dụ gồm có van điện, kẹp và động cơ .
Trong toàn cảnh của dự án Bất Động Sản này, thuật ngữ Actuator ‘ được sử dụng để diễn đạt không chỉ động cơ bước có tương quan mà còn cả lắp ráp .
Thiết bị truyền động cụ thể
Các bộ truyền động cho dự án Bất Động Sản này gồm có ba hộp số, mỗi hộp sử dụng hộp số 38,4 : 1 .
Điều đó nghĩa là gì ? Chà, thứ nhất bạn nên biết rằng một mạng lưới hệ thống bánh răng là một trong những TT của một hoặc nhiều bánh răng xoay quanh TT của một thiết bị khác. Thứ hai, tỷ suất đề cập đến sự độc lạ về răng của bánh răng liên kết .
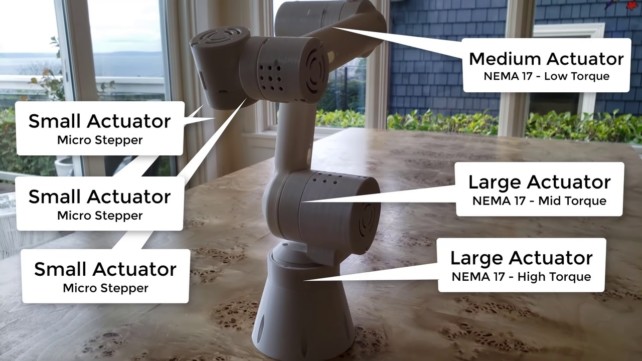
Ba bộ truyền động sử dụng động cơ bước Nema 17 và size khác nhau tùy theo những khớp mà chúng điều khiển và tinh chỉnh. Video YouTube của John cho thấy cách lắp ráp những bộ truyền động, điều này đặc biệt quan trọng có ích vì chúng là phần chi tiết cụ thể nhất của bản dựng .
Kẹp
Cánh tay robot được trang bị một bộ kẹp robot tương thích. Như với những bộ truyền động, Jeff gồm có tổng thể những thông tin tương quan ( nhu yếu, in và lắp ráp ) trong một trang Thingiverse riêng không liên quan gì đến nhau .
Các đầu xoay của kẹp phải tương thích với hầu hết những đối tượng người dùng để mang lại sự chắc như đinh hơn. Mỗi ngón tay của kẹp là một thiết bị lăn bị kẹt giữa hai giá đỡ, vì Jeff thích điều này hơn những trụ cố định và thắt chặt .
Những gì bạn cần

Đối với những nhu yếu, chúng tôi sẽ cho rằng bạn mở màn dự án Bất Động Sản từ đầu, có nghĩa là bạn cần phải có những bộ truyền động và bộ kẹp .
Các bộ phận chính:
- Hộp số cho vòng quay cơ sở
- Động cơ bước Nema 17 (59 N⋅cm) cho khớp vai
- Động cơ bước Nema 17 (40 N⋅cm) cho khuỷu tay
- 4 NEMA 17 động cơ bước (13 N⋅cm) cho cổ tay và kẹp
Xin quan tâm rằng đây là những động cơ được yêu cầu, nhưng bạn hoàn toàn có thể tự do mua những mẫu sản phẩm tương tự khác .
- 7 Bộ điều khiển động cơ bước / FBA
- Cáp xoắn đôi (24 AWG)
- Chân cái
- 3/32 ống co nhiệt (100 ft)
- Airsoft BB 6 mm
- Du-Bro 362 6-32
- Du-Bro 361 4-40
- Băng dính hai mặt
Jeff đã sử dụng phần sụn tùy chỉnh của riêng mình để tương hỗ hoạt động phối hợp và anh ấy đã san sẻ toàn bộ những chi tiết cụ thể – mã nguồn, tài liệu và lập trình – trên Google Drive .
Vít và ốc ( số cái gần đúng):
Xem thêm: Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia Thành phố Hồ Chí Minh – Wikipedia tiếng Việt
- 30 6-32 x 3/8 kẽm ổ cắm đầu máy vít
- 20 6-32 ốc
- 30 2-56 x 1/8 nút vặn nắp ổ cắm
- 20 4-40 x 3/8 vít nắp đầu bằng hợp kim cứng
- 20 4-40 ốc
- 20 4-40 x 1/4 vít nắp đầu phẳng
In 3D

Theo Jeff, những bộ phận cấu trúc của cánh tay được in thuận tiện mà không cần tương hỗ. Cá nhân ông đã sử dụng máy in 3D MakerGear M2 và PLA với những thiết lập sau :
- Độ phân giải: 0,2 mm
- Infill: 25%
- Không giới hạn: Không
- Hỗ trợ: Không
John có một bánh răng độc lạ. Ông đã in thành công xuất sắc những bánh răng – sử dụng AmazonBasics PLA – mà không cần phải chà nhám. Anh ta đã sử dụng Ender 3 và những setup của anh ta như sau :
- Độ phân giải: 0,1 mm
- Phái: Có
- Nhiệt độ đầu đùn: 235 ° C
- Nhiệt độ đế: 65 ° C
Anh ta đề cập rằng anh ta đã không sử dụng mặc định góc nhọn sắc nét của Cura, nhưng thay vào đó, anh ta đã chọn ngẫu nhiên đường nối đường may Z của Z để có được những bộ phận trơn tru nhất hoàn toàn có thể .
Thiết bị truyền động và lắp ráp cánh tay

Thiết bị truyền động
Nói chung, những bộ truyền động sẽ cần chà nhám thích hợp và nộp trước khi bạn hoàn toàn có thể phá vỡ chúng. Theo John, một chất bôi trơn ( như chất bôi trơn mỡ silicon ) sẽ bảo vệ những bộ truyền động chạy trơn tru .
Cánh tay
Trước khi bạn khởi đầu lắp ráp và đấu dây cho cánh tay, hãy đặt tổng thể những bộ điều khiển và tinh chỉnh và động cơ lên bàn và thực thi 1 số ít thử nghiệm để xác nhận mọi thứ đều hoạt động giải trí tốt .
Một lần nữa, Jeff đã trình diễn chi tiết cụ thể quy trình lắp ráp cánh tay trên Thingiverse .
Bạn sẽ có ba khớp chính : khớp cơ sở, khớp vai và khớp khuỷu tay. Một khi tổng thể những bộ truyền động tương ứng đã hoàn thành xong, bạn hoàn toàn có thể lắp cổ tay .
Nối dây
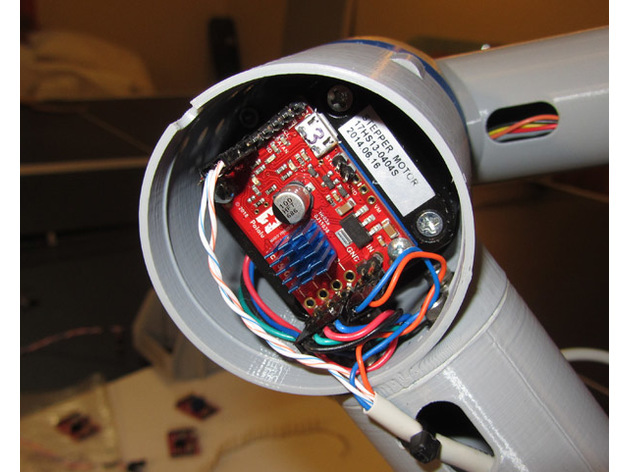
Bên trong khuỷu tay .
Jeff thừa nhận rằng mạng lưới hệ thống dây điện hoàn toàn có thể hơi phức tạp, hầu hết là do những bộ truyền động không có lỗ ở TT như những UR3 của chúng. Do đó, bạn sẽ cần xác lập cách cáp sẽ chạy qua từng khớp trong khi vẫn có đủ độ chùng để chuyển dời khớp thuận tiện .
Jeff đã sử dụng một bus tiếp nối đuôi nhau ( V +, GND, TX, RX ) với những board điều khiển và tinh chỉnh nhỏ được phân phối khắp cánh tay và mỗi động cơ có một board riêng. Điều này có nghĩa là để giảm số lượng dây dẫn xung quanh .
Cách nối dây chi tiết cụ thể hơn có sẵn trên Thingiverse .
Kiểm tra phần cứng và phần mềm
Như đã đề cập trước đó, Jeff đã phân phối tài liệu về phần sụn được sửa đổi được sử dụng cho những bảng T500. Cùng một thư mục chứa một chương trình thử nghiệm Windows và mã nguồn C + + cho chương trình thử nghiệm .
Jeff thừa nhận rằng phần khó nhất là phần sụn đã được sửa đổi của anh ấy được đưa lên bảng. Bạn hoàn toàn có thể phải liên hệ với những nhà sản xuấtcủa board tinh chỉnh và điều khiển để nhu yếu nếu họ hoàn toàn có thể bán bảng của họ được flash trước .
Mặt khác, Microchip cung cấp một video có thể giúp bạn chỉnh lại bảng T500, nhưng bạn vẫn cần tham khảo chi tiết sửa đổi phần sụn của Jeff để xác nhận cách mỗi chân được kết nối.
Xem thêm: Khám phá vũ trụ
Phần sụn board T500 tiêu chuẩn không hề giải quyết và xử lý những hoạt động đa trục mà cánh tay nhu yếu, và đây là điều khiến Jeff tự viết. Nếu bạn muốn đồng nhất hóa và hoạt động phối hợp tương thích, bạn sẽ không có lựa chọn nào khác ngoài lập trình phần sụn của Jeff vào những board tinh chỉnh và điều khiển. Nếu bạn thích, bạn vẫn hoàn toàn có thể dùng phần sụn tiêu chuẩn, nhưng bạn sẽ không nhận được sự đồng điệu hóa tốt nhất từ tổng thể những khớp .
Cánh tay của John có một chút ít độc lạ :
- Anh ấy đã sử dụng ESP32 chạy NodeMCU để tạo tín hiệu bước và anh ấy đã thêm các nút để khởi động và dừng động cơ.
- Anh ấy cũng thêm các hướng ngược lại để làm cho việc tháo ráp và thử nghiệm dễ dàng hơn. Anh ấy đã sử dụng chip DRV8825 (mặc dù anhđang xem xét trình điều khiển DRV8824 vì trình điều khiển DRV8825 đang giải phóng dòng điện dư thừa vào động cơ nhỏ hơn) để điều khiển động cơ và ChiliPeppr ESP32 cho không gian làm việc của Lua để viết code.
Source: https://sangtaotrongtamtay.vn
Category: Công nghệ